Python Pid Template Vex V5
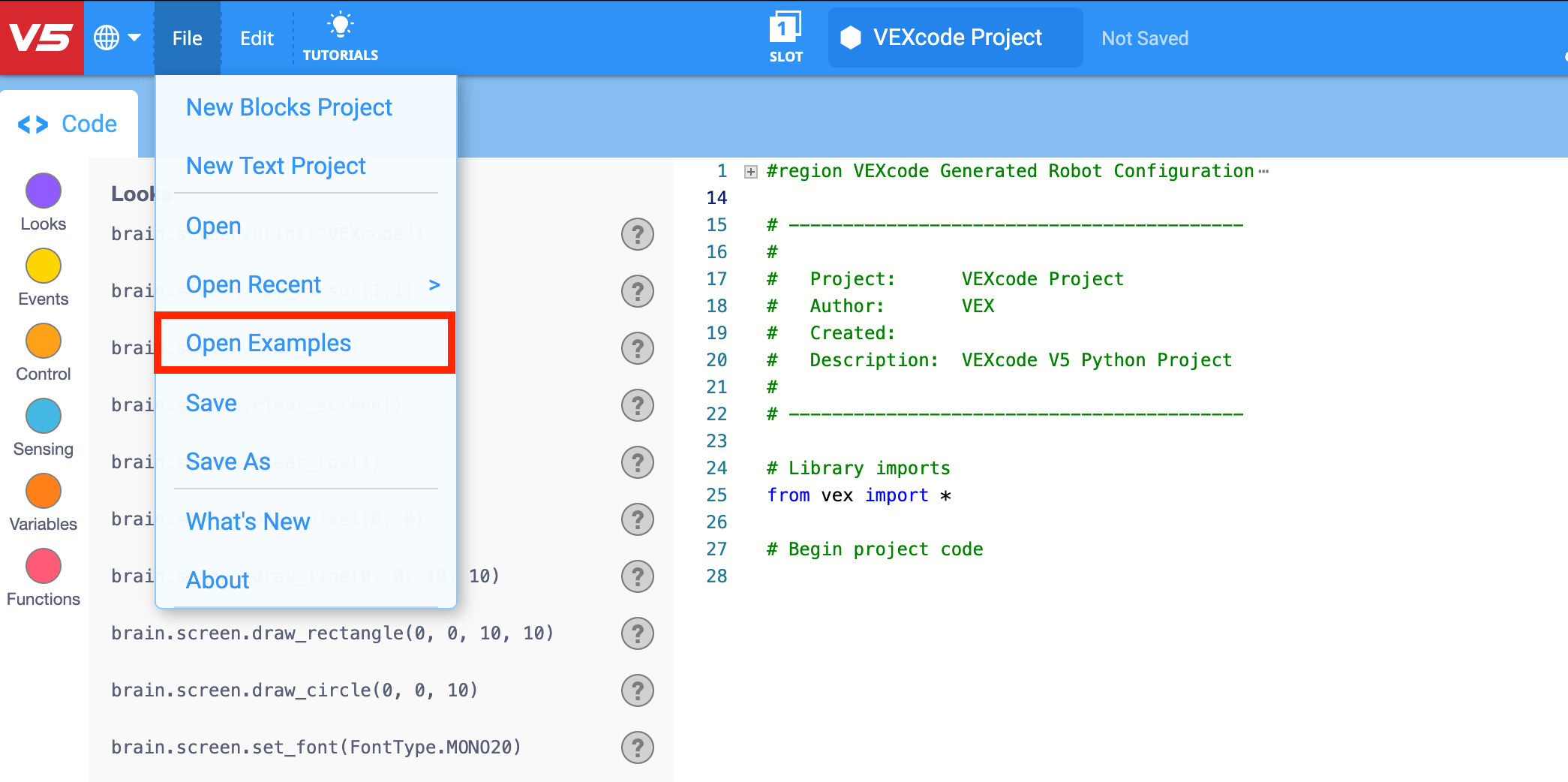
Python Pid Template Vex V5 - Using the python competition template in vexcode v5. Welcome to the vex library,. The difference between the current state and that target state are fed into the pid which returns an output power level (based on tuning the pid’s constants). Import the project in vexcode pro v5 or vex vs code by choosing import from the file menu and selecting the. The creation of this template was inspired by. Using the context menu in vexcode v5 python.
Using the context menu in vexcode v5 python. Using the code viewer for python in vexcode v5. Driving (forward/backward) and turning (left/right). An example implementation of a pid controller in robotc for vex. Explore python blocks, enums, ai vision, controller settings, and motor groups to optimize your robot's.
VEX V5 Speedy Delivery Lab 5 Programming the Claw Python

Using the python competition template in vexcode v5. Driving is composed of two actions: Discover tips on axis, button, screen, and other python enumerations to streamline your robotics projects. The project outlined here will drive the v5. Dive into the world of vex v5 programming with our extensive python documentation.
How to code drivetrain in vex VSCode extension (Python) VEXcode V5

How to build a python project. If you are able to these two actions autonomously with reasonable accuracy, you. The controller will aim to adjust the motor's speed based on feedback from an encoder, with the pid loop handling the control logic. This section will show you how to create a basic python project using commands from the tool box..
Using the Python Competition Template in VEXcode V5 VEX Library
It’s built in to the v5 motors. This section will show you how to create a basic python project using commands from the tool box. Here is our current program: An example implementation of a pid controller in robotc for vex. The difference between the current state and that target state are fed into the pid which returns an output.
Brand Python Vector SVG Icon SVG Repo

Welcome to the vex library,. Using the python competition template in vexcode v5. Using the code viewer for python in vexcode v5. Discover tips on axis, button, screen, and other python enumerations to streamline your robotics projects. Discover everything you need to start coding with vexcode v5, using blocks, python, and c++.
Using the Python Competition Template in VEXcode V5 VEX Library
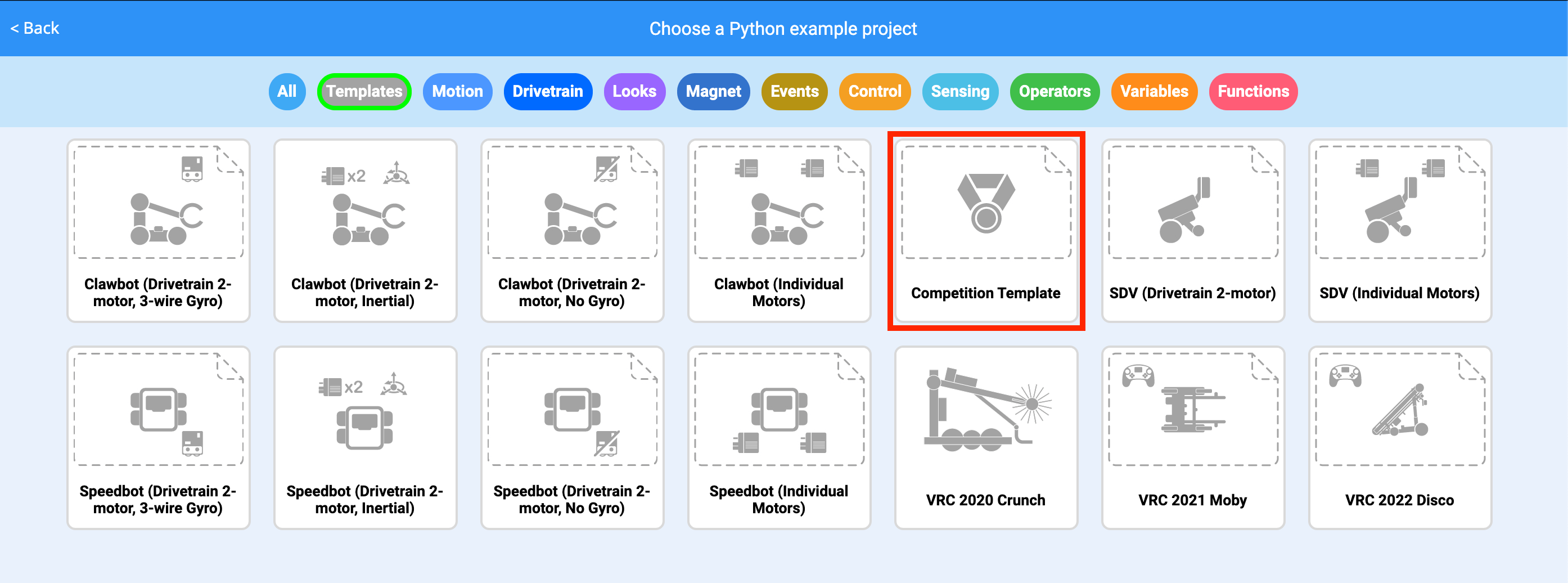
Using the code viewer for python in vexcode v5. The creation of this template was inspired by. Discover everything you need to start coding with vexcode v5, using blocks, python, and c++. Import the project in vexcode pro v5 or vex vs code by choosing import from the file menu and selecting the. This section will show you how to.
Python Pid Template Vex V5 - Here is our current program: It is in c++ but if you understand python, it should be able to help your understanding of how to set up a pid. If you are able to these two actions autonomously with reasonable accuracy, you. Import the project in vexcode pro v5 or vex vs code by choosing import from the file menu and selecting the. Using the code viewer for python in vexcode v5. Driving is composed of two actions:
Explore python blocks, enums, ai vision, controller settings, and motor groups to optimize your robot's. It’s built in to the v5 motors. This guide will help you navigate the site and make the most of the available resources. Driving (forward/backward) and turning (left/right). Import the project in vexcode pro v5 or vex vs code by choosing import from the file menu and selecting the.
The Difference Between The Current State And That Target State Are Fed Into The Pid Which Returns An Output Power Level (Based On Tuning The Pid’s Constants).
The controller will aim to adjust the motor's speed based on feedback from an encoder, with the pid loop handling the control logic. In this tutorial, we'll simulate a simple pid controller for a dc motor in python without using classes. Discover tips on axis, button, screen, and other python enumerations to streamline your robotics projects. Welcome to the vex library,.
The Project Outlined Here Will Drive The V5.
Using the python competition template in vexcode v5. It is in c++ but if you understand python, it should be able to help your understanding of how to set up a pid. Driving (forward/backward) and turning (left/right). What are some possible solutions to this problem?
Using The Context Menu In Vexcode V5 Python.
Discover everything you need to start coding with vexcode v5, using blocks, python, and c++. If you are able to these two actions autonomously with reasonable accuracy, you. Here is our current program: Import the project in vexcode pro v5 or vex vs code by choosing import from the file menu and selecting the.
It’s Built In To The V5 Motors.
Driving is composed of two actions: #pragma config (sensor, dgtl1, armencoder, sensorquadencoder) #pragma config (motor,. Explore python blocks, enums, ai vision, controller settings, and motor groups to optimize your robot's. Void pre_auton (void) { // initializing robot configuration.